
As cabeças de leitura/escrita
A sua Evolução
Para se atingirem densidades como as referidas, rondando os 400 Gb/in2, a intensidade do campo magnético teve que ser drasticamente reduzida, para que não provocasse interferência na leitura dos pontos mais próximos.
Em consequência, as cabeças tiveram que reduzir as suas dimensões e aproximar-se dos pratos, por forma a conseguirem detetar esses pequenos campos magnéticos sem serem influenciadas pelos campos mais próximos.
Vamos acompanhar, através de alguns tipos de cabeças que podem representar sua evolução, os vários estádios por que as mesmas passaram e mesmo a alteração da forma tradicional de registo do campo magnético, para poder tirar partido da evolução das cabeças e consequente forma de registo magnético..
Inicialmente, as cabeças eram constituídas por um elemento de ferro envolvido por uma bobina que fazia variar a sua polaridade consoante o fluxo de corrente elétrica na bobina.
As cabeças TF ( Thin Film ou filme fino), constituídas por um elemento com propriedades eletromagnéticas, criado sobre um suporte a que se chama slider (deslizador) e envolvido por uma bobina, são uma alternativa às primeiras, após várias outras que já permitiram uma enorme evolução intermédia.
As cabeças MR ( MagnetoResistive ou Magnetoresistivas), tinham como principal característica o facto de serem constituídas por cabeças diferentes para a escrita e para a leitura.
- A escrita era feita por uma cabeça que obedecia aos conceitos TF, com evoluções no sentido de cada vez as tornar mais eficientes e pequenas.
- A leitura era feita por uma cabeça constituída por um material magnetoresistivo, isto é, cuja resistência à passagem da corrente elétrica se altera consoante varia o campo magnético em presença.
Nas cabeças MR, a cabeça de leitura está envolvida pela de escrita, devidamente isoladas entre si, o que garante que a leitura, porque efetuada num campo de dimensão inferior ao da escrita, não é influenciada por campos adjacentes.
A evolução para cabeças diferentes de leitura e escrita permitiu também ultrapassar a dificuldade crescente que representava o conflito entre as duas funções numa mesma cabeça. A partir de um determinado ponto da evolução, para melhorar a escrita piorava-se a leitura e vice-versa.
Mas a evolução não parava. Cada vez aumentava mais a densidade nos pratos, diminuindo em consequência a intensidade dos campos magnéticos bem como a sua dimensão, sendo portanto necessário apurar mais a eficiência das cabeças e reduzir a sua dimensão.
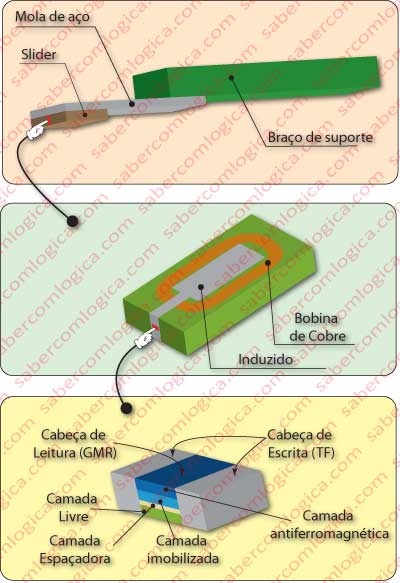
As cabeças GMR (Giant MagnetoResistive), que representamos graficamente na figura 2, são o nosso passo seguinte nesta escalada da evolução. A sua sensibilidade a mudanças de fluxo é bem maior que a das cabeças MR, o que garante a sua eficiência perante campos magnéticos bem menos fortes. Também a sua dimensão pode ser mais reduzida. Claro que o termo Giant (Gigante) nada tem a ver com a dimensão mas sim com a magnetoresistividade.
As diferentes camadas que compõem a cabeça magnetoresistiva passam sequencialmente sobre o campo magnético:
- A camada livre é a camada sensível e, como o nome diz, é livre de rodar conforme o campo magnético a que é exposta.
- A camada espaçadora é não magnética mas eletricamente condutora, como por exemplo o cobre. Tem por função separar magneticamente a camada livre da camada imobilizada.
- A camada imobilizada tem uma orientação magnética fixa (imobilizada) devido à influência da sua vizinha camada antiferromagnética.
- A camada antiferromagnética é feita de um material antiferromagnético (que não é sensível às variações de campos magnéticos à sua volta) e fixa a orientação magnética da camada imobilizada.
De acordo com este comportamento, conforme o campo magnético a que estiver exposta, a camada livre roda a sua orientação magnética, ficando ou não alinhada com a camada imobilizada, ao que corresponde o estado condutor ou resistente do conjunto.
Assim está conseguida a magnetoresistividade das cabeças.
Mas, mesmo assim, o processo de gravação utilizado não permitia ultrapassar valores entre os 100 e 200 Gb/in2. Isto devido ao efeito superparamagnético, que consiste no facto de partículas de muito pequenas dimensões (nanométricas), poderem alterar espontaneamente a sua orientação magnética sob o efeito da temperatura, deturpando assim a informação por elas contida. Era necessário encontrar outro método de registo magnético.
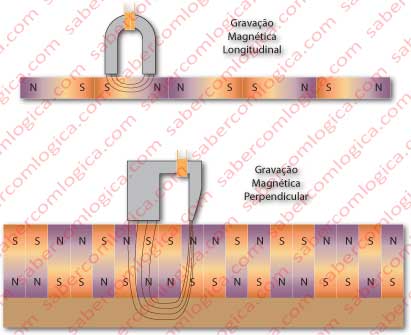
O PMR (Perpendicular Magnetic Recording) foi a solução encontrada para substituir o até então usado método de gravação longitudinal. A figura 3 tenta ilustrar as diferenças entre os dois métodos.
Perguntar-se-á: mas então, nesta situação, o tal efeito superparamagnético já não produz efeitos?
O efeito superparamagnético varia de uma forma inversamente proporcional com o tamanho da partícula e com a sua coercividade, isto é, quanto menor a partícula e quanto menor a coercividade do material da partícula, maior a possibilidade de acontecer o efeito superparamagnético.
O que é isso de coercividade?
Coercividade é a quantidade de energia necessária para trazer uma determinada partícula magnetizada até à saturação, para uma situação de magnetização zero. Digamos que, quanto mais coercivo for um material mais forte e resistente será a sua magnetização. Em contrapartida, maior terá que ser a capacidade para o magnetizar ou inverter a sua orientação magnética.
É aqui que a magnetização perpendicular joga forte. Como a incidência do campo produzido pela cabeça é pontual e vertical, ela pode ser muito mais intensa sem afetar campos adjacentes, tendo consequentemente uma muito maior capacidade de penetração.
Isto permite, por um lado que o filme magnético seja produzido num material muito mais coercivo e por outro lado aumentar a sua espessura, tornando a partícula de muito maior coercividade, embora reduzindo a sua dimensão longitudinal. A fina camada de material magneticamente brando colocada por baixo desta, joga um papel complementar ao das cabeças na produção do efeito desejado.
A partícula magnetizada, com os polos alinhados verticalmente, permite praticamente triplicar a densidade nos pratos.
Foi assim que se conseguiu chegar às atuais densidades à volta dos 400 Gb/in2 e aos discos com capacidades de 2 TB, sendo expectável que o limite máximo de densidade a atingir ronde 1 Tb/in2.
As cabeças TMR (Tunel MagnetoResistive ou de Magnetoresistividade em Tunel), surgiram como adaptação das cabeças GMR às necessidades da gravação perpendicular. A diferença fundamental entre a GMR e a TMR consiste na substituição da camada separadora por uma fina camada isoladora entre a camada livre e a camada imobilizada.
Se a camada isoladora for suficientemente fina (da ordem dos nanómetros), os eletrões conseguem fluir da camada livre para a camada imobilizada de uma forma perpendicular às duas. Assim, consegue-se atingir simultaneamente uma maior impedância e uma muito maior magnetoresistividade.
O efeito magnetoresistivo resulta do facto de os eletrões só fluírem no caso de os campos magnéticos das camadas livre e imobilizada estarem alinhados, tal como no caso das GMR.
Este tipo de cabeças TMR é o atualmente mais utilizado nos HD, principalmente nos casos de grandes densidades e de gravação perpendicular.
Como se Movimentam

Vamos agora ver como é que as cabeças viajam entre os diversos pontos do HD, onde a informação pretendida se encontra.
Já vimos como é que as minúsculas e tão sofisticadas cabeças de escrita/leitura se fixam aos deslizadores (sliders) nos gráficos que apresentámos atrás e agora podemos visualizar na fotografia da figura 4.
Os deslizadores que suportam as cabeças são fixos a umas molas metálicas que, por sua vez são fixas a braços metálicos de suporte. Estes braços suportam um ou dois destes conjuntos, conforme falamos do braço superior e inferior, ou dos braços intermédios. Os dois primeiros servem uma só face de um prato. Os restantes servem duas faces de pratos (a inferior de um e a superior de outro).
As notas (x) que se podem ver de seguida referem-se à figura que voltamos a colocar já de seguida como figura 1. Para acompanhar a descrição clique ou toque nelaa e abra-a numa nova janela.

Este conjunto de braços de suporte está ligado solidariamente entre si, deslocando-se sempre em conjunto em torno de um eixo (10). A este conjunto chama-se Atuador (18) e o seu movimento é regulado pela parte que se destaca para além do conjunto de braços, onde está colocada uma bobina de indução (14). Esta bobina está suspensa entre dois potentes magnetos (16) que, conforme a intensidade e sentido da corrente elétrica na bobina, regulam o movimento e posicionamento do atuador.
Os magnetos são suportados por duas peças (17) que garantem o distanciamento entre os magnetos de forma a que a bobina se movimente livremente entre eles. A peça (15) serve como limitadora da deslocação do atuador.
Tal como já mencionámos atrás, as cabeças voam a uma distância nanométrica dos pratos sem lhes poderem tocar.
E como se consegue isso?
Como se vê na fotografia da figura 4, as cabeças fora dos pratos são pressionadas umas contra as outras (reparem que algumas já estão deterioradas – não podem sair do seu meio natural). Precisamente devido a este facto, quando o disco pára, as cabeças são de imediato levadas para uma zona de parqueamento, um pequeno espaço dos pratos reservado para o efeito e sem gravação, onde finalmente as cabeças tocam os pratos.
Quando os pratos começam a girar e entram em velocidade de cruzeiro (digamos 7200 RPM), uma camada de ar desloca-se entre os pratos e as cabeças, provocando naquelas um efeito aerodinâmico que as faz oporem-se à força das molas e levantar voo. E tudo está calculado para que levantem Quanto Baste (QB), isto é, nem muito, caso em que não detetariam os pequenos campos magnéticos dos pratos, nem pouco, caso em que arriscariam tocar no prato em movimento provocando aquilo que vulgarmente se designa por aterragem das cabeças e o consequente fim do HD.
Reparem, voltamos a repetir, o efeito aerodinâmico num sentido, a força das molas no outro, estão calculados para fazerem as cabeças voar sobre os pratos rigorosamente a algumas dezenas de nanómetros de distância, mesmo em condições de turbulência ou pequenos choques.
Reforçamos o facto de estarmos perante uma maravilha tecnológica, onde a nano dimensão está aplicada num dispositivo eletromecânico e funciona.
Os discos não são hermeticamente fechados em ambiente isento de poeiras?
São sim. Mas não em vácuo, como alguns pensam. Senão, como se geraria o tal efeito aerodinâmico? Existe ar dentro do HDD e renovável, passando no entanto obrigatoriamente por duas entradas onde se encontram filtros de ar (23).
Só para que se entenda melhor o porquê do embalamento dos discos num ambiente livre de poeiras e a filtragem do ar de renovação, apresentamos um esquema comparativo da distância de uma cabeça ao prato com a dimensão de um micro grão de poeira, na figura 5.

Portanto e em resumo, as cabeças são sustentadas pelas molas metálicas que por sua vez estão agarradas aos braços. Os braços que correm entre dois pratos sustentam dois conjuntos e os braços superior e inferior sustentam um conjunto cada. Todo o conjunto (Atuador) está solidário e desloca-se como um todo, devido à existência de uma bobina indutora que dele faz parte e que se movimenta por entre dois magnetos de acordo com a intensidade e sentido da corrente elétrica que a percorre. Estamos perante o que se chama de um motor linear, que é o correntemente usado.
Anteriormente o Atuador era movimentado por um motor de passo, sendo que cada passo correspondia a uma pista. Bons tempos. Tal não seria possível com a atual densidade de pistas. Mas estou-me a adiantar e a falar de pistas. Já lá vamos. O motor linear, para além de ter desgaste não se adaptava às dilatações térmicas dos pratos consequência das mudanças de temperatura. E com a densificação da informação, veio a sua caducidade.
O Atuador comunica com a placa controladora através de uma fita flexível transmissora de dados (12). Esta está ligada a um elemento que estabelece a comunicação por contacto com a placa controladora (5), depois de inserido na cavidade que lhe é destinada. Esta transmissão pode ser entendida seguindo no quadro de componentes os nºs que mencionados. Entenda-se que a placa controladora está colocada por detrás da caixa onde está o restante conjunto de pratos e atuador.